
Seit einiger Zeit haben wir Hühner. Da wir öfter mal am Abend alle weg sind und dann niemand die Tür vom Hühnerstall zumacht — die Hühner gehen, im Gegensatz zu den Enten die wir früher hatten, von selber bei Dämmerung in den Stall — brauchten wir eine Lösung, die automatisch die Tür schließt. Es gibt fertige Hühnerställe mit einer zeitgesteuerten Tür — aber weder mit Dämmerungsschalter noch eine Türelektronik einzeln.
v.l.n.r Kokoschka, Leuchtfeder, Gertrude :-)
Alle verwendeten Teile sind bei Conrad erhältlich, wo wir es noch rekonstruieren können geben wir die Bestellnummern und den Link zum Artikel an. Conrad ist zwar relativ teuer, dafür bekommt man für dieses Einmalprojekt alle Teile bei einem Händler und wer was nachbauen will kann im deutschsprachigen Raum über einheitliche Teilenummern auf die gleichen Teile zugreifen, sei es in Österreich, der Schweiz oder Deutschland.
Einige Teile unserer Lösung eignen sich sicher auch für andere Projekte, nicht viele Leute werden eine Hühnerstalltüre brauchen …
Die Hühnerstalltüre funktioniert jetzt schon ein paar Wochen. Anfängliche mechanische Probleme (Tür verklemmte sich einige Male beim Herunterfahren) sind wohl gelöst. Unsere Software hat einen Zeitcheck falls beim Runter- oder Rauffahren doch mal was schiefgeht.
In der Folge beschreiben wir den Aufbau, getrennt nach Mechanik, Elektronik und Software — die Aufteilung zwischen Mechanik und Elektronik ist etwas willkürlich, wir haben die ganze Elektromechanik
(Motor, Schalter) zur Mechanik gerechnet.
Die Mechanik
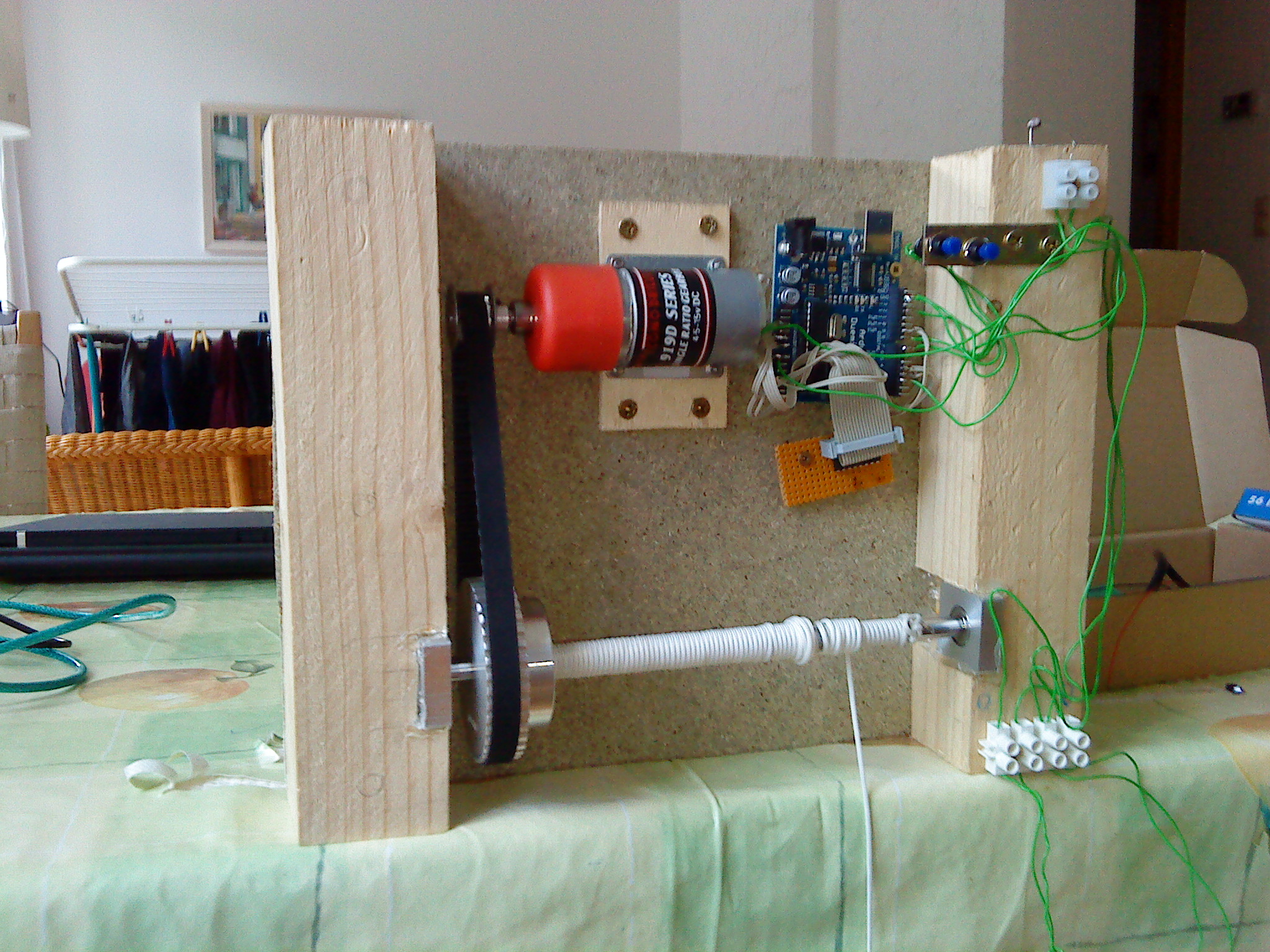
Mit einem Getriebemotor wird eine Welle über einen Zahnriemen-Antrieb (Übersetzung nochmal 4:1) angetrieben. Der Getriebemotor ist schon 148:1 untersetzt. Die Welle läuft auf Kugellagern, die in einem Holzrahmen montiert sind. Die Lagerflansche sind einfach mit Heisskleber in den ausgestemmten Teil der Holzlatten geklebt. Vorsicht, keinen Heisskleber ins Lager bringen…
Die Übersetzung wurde so gewählt, dass wir eine bis zu 800g schwere Tür mit einer Welle mit Radius 5mm gut hochziehen können. Das Drehmoment des verwendeten Motors ist etwa 1,2 Ncm, mit der 4:1 Übersetzung mit dem Zahnriemen kommen wir auf 4.8 Ncm.
Die Welle wickelt dann eine Nylonschnur auf, die an der Tür angebunden ist. Die Nylonschnur hat einen Durchmesser von 2mm, die Welle wurde mit einem 2mm Titanbohrer gebohrt. Zum Bohren der Welle haben wir einen Stellring verwendet, einfach durch das Schraubenloch des Stellringes gebohrt, der Stellring war mit Klebeband fixiert.
Das Einfädeln der Nylonschnur kann man sich erleichtern, indem man die Nylonschnur mit einem Feuerzeug an einer Stelle erhitzt und auseinanderzieht, die entstehende Spitze eignet sich recht gut zum Einfädeln.
Motor: Eigentlich wollten wir ursprünglich einen kleineren Motor, da der jetzt verwendete Motor bis zu 2A Strom zieht (bei hoher Last — unsere Tür ist relativ leicht, dadurch ist die Last und damit der Strom recht niedrig). Das könnte mal zuviel für den verwendeten H-Bridge Motorcontroller werden.
Die Tür selbst hat einen Magneten, der in zwei Stellungen (Tür ganz oben bzw. ganz unten) jeweils einen Magnetschalter auslöst.
Für das Justieren (von Hand Türe rauf- bzw. runterfaheren) gibt es zwei Taster die an digitalen Inputs des Arduino angeschlossen sind.
Mechanischer Aufbau
Teileliste Mechanik:
Im folgenden Bild sieht man die Tür im Zustand “NACHT” (zu). Die Magnetschalter und der Magnet an der Tür sind gut zu erkennen. Oben im Bild ist ein Stück Sperrholz auf Abstandshaltern so montiert, dass die Schnur durchläuft und beim Hochfahren die Tür an die Hüttenwand gedrückt wird.

Hühnerstalltür im geschlossenen Zustand mit Magnet und Magnetschaltern
Die Elektronik
Der Dämmerungsschalter ist mit einem einfachen Photowiderstand in einem Spannungsteiler mit einem 10k Widerstand realisiert. Der Photowiderstand ist über ein Lautsprecherkabel mit Heisskleber im Holzdach montiert. Oberhalb des Photowiderstands ist ein Acryl-Welldach. Die Magnetschalter sind an digitale Eingangspins des Arduino angeschlossen.
Die Motorsteuerung erfolgt über eine H-Bridge Schaltung in einem IC. Die Elektronik dazu findet auf einer Lochraster-Platine Platz. Die einfache H-Bridge benötigt keine externen Teile. Wie man das mit dem Arduino verdrahtet ist ganz gut auf der Seite der Physical Computing Labs der Tisch School of the Arts beschrieben — ist auch der erste Link auf den ich beim googlen nach “Arduino Motor Control” gestoßen bin.
Wir wollen aber — wegen des größeren Motors — auf eine größere H-Bridge, die braucht externe Schaltdioden (das Datenblatt des L298N schlägt Dioden mit höchstens 200ns reverse recovery time (trr) vor, wir werden die BYV 2100 verwenden mit einer trr von 12.5ns)
Teileliste Elektronik:
Alternative größere H-Bridge:
Die Software
Der Dämmerungsschalter sollte laut Wikipedia bei ca. 100 lux das Öffnen der Tür veranlassen und bei höchstens 3.4 lx (Dark limit of civil twilight under a clear sky) das Schließen. In dem Wikipedia-Artikel ist eine Tabelle, die einen sehr dunklen Tag mit 100lx angibt, die deutsche Version enthält leider keine ausführliche Tabelle. In unseren Experimenten war ein Meßwert des Arduino von 200 für “Jetzt ist es dunkel, Tür zu” und von 300 für “Jetzt ist es hell, Tür auf” gut — auch in den jetzt dunklen Wintertagen (auch bei einem Gewitter) bleibt die Tür tagsüber offen und schliesst zuverlässig bei Dunkelheit. In einer klaren Vollmondnacht blieb die Tür zu.
Die Steuerung ist als Zustandsautomat (State Machine) realisiert. Jenachdem welcher Magnetschalter beim Einschalten Kontakt hat, startet der Automat im Zustand “TAG” bzw. “NACHT”. Wird keiner der Magnetschalter gesehen, gehen wir in den Zustand “ERROR”. Dieser Zustand bildet auch alle anderen Fehlerzustände ab, die im Betrieb auftreten können. Dabei setzen wir eine Fehlermeldung, die dann über die serielle Schnittstelle des Arduino (USB Serial) ausgegeben wird.
Der Zustandsautomat verwendet Statusfunktionen: In einem bestimmten Zustand wird die zugehörige Zustandsfunktion ausgeführt. Wenn diese Funktion 0 zurückliefert, geht der Automat in den nächsten Zustand, sonst bleibt er im alten Zustand.
Durch die Verwendung von Statusfunktionen (und keiner speziellen Funktion beim Zustandsübergang) haben wir zwei zusätzliche Zustände um den Motor einzuschalten, dieser Zustand (START_RAUF bzw. START_RUNTER) schaltet den Motor ein und geht sofort in den nächsten Zustand über.
Die Verdrahtung mit dem Arduino, also an welchen Pins welche Peripherie angeschlossen ist, sind über define’s am Beginn des Programms festgelegt.
Die Logik für die digitalen Inputs verwendet die Arduino-internen Pull-Up Widerstände. Daher ist die Logik invertiert: Wenn der Taster (oder ein Magnetschalter) geschlossen ist, liefert der entsprechende digitale Input eine 0.
Beim Testen haben wir festgestellt, dass bei laufendem Motor gelegentlich eine gedrückte Taste — oder ein geschlossener Magnetschalter detektiert wird. Daher haben wir in Software alle digitalen Inputs entprellt (Funktion debounced_read). Vermutlich sollten wir vor der H-Bridge noch einen Entstörkondensator vorsehen.
Die beiden Taster zum manuellen Rauf- und Runterfahren setzen ein Flag das den Zustandsautomaten neu initialisiert — dadurch muss man nach dem manuellen Kalibrieren kein Reset ausführen: Einfaches Drücken der Rauf- bzw. Runter-Taste reicht, um ein neues Initialisieren durchzuführen.
Im Error-Status warten wir 100ms nach dem Ausgeben der Fehlermeldung. Durch dieses Delay merkt man bei Drücken des Rauf- bzw. Runter-Knopfes sofort, ob sich das Gerät im Error-Zustand befindet: Wenn ein Error-Zustand vorliegt, bewegt sich der Motor nicht sofort, sondern erst nach einem kurzen Delay. Wenn der Zustandsautomat korrekt initialisiert ist, bewegt sich der Motor sofort.
Während der Entwicklung habe ich mit etwas mit einem Bug der Arduino-Entwicklungsumgebung gekämpft: Um Function-Style casts (Typumwandlungen die wie eine Funktion aussehen) zu ermöglichen, macht die Entwicklungsumgebung Code-Rewriting und fügt insbesondere einige Preprozessor-Defines ein, die es verhindern, einen Funktionspointer in C zu deklarieren. Der Workaround ist ein “#undef int” vor der Funktionspointer-Deklaration einzufügen. Gleich am Anfang kann man das nicht machen, da das Code-Rewriting ein #include direkt vor dem ersten Statement (nach allen #include und #define Direktiven) einfügt. Dieses “Feature” hat durch obskure Fehlermeldungen einiges an Zeit gekostet, was mich veranlasst hat, einen Beitrag im Arduino Forum dazu zu schreiben.
Die verwendeten Timer-Routinen (#include <timer.h> und der Typ Arduino_Timer) dienen dazu, auf eine bestimmte Zeit nach dem Aufruf von millis() zu warten — auch wenn die von millis verwendete Variable inzwischen überläuft. Der Timer lässt sich fragen, ob der gewünschte Zeitpunkt schon erreicht ist. Ursprünglich habe ich diese Routinen geschrieben, weil Version 0011 (und früher) der Arduino Entwicklungsumgebung einen Bug hatte, so dass der Timer zu früh überlief. Die entsprechenden Timer Routinen (für Version 0011 oder ab 0012) gebe ich gern auf Anfrage weiter.
#include <timer.h>
#include <stdio.h>
# define LED 13
# define MAGNET_OBEN 7
# define MAGNET_UNTEN 8
# define FOTO 0
# define MOTOR 9
# define MOTOR_DIR1 4
# define MOTOR_DIR2 3
# define MOTOR_MIN 0x7F
# define KNOPF_RAUF 12
# define KNOPF_RUNTER 2
# define HELL 300
# define FINSTER 200
# define STATUS_TAG 0
# define STATUS_ABEND 1
# define STATUS_NACHT 2
# define STATUS_MORGEN 3
# define STATUS_START_RAUF 4
# define STATUS_RAUFFAHREN 5
# define STATUS_START_RUNTER 6
# define STATUS_RUNTERFAHREN 7
# define STATUS_ERROR 8
int status = STATUS_ERROR;
char errbuf [80];
char *errmsg = “”;
int neuinitialisieren = 1;
int debounce_magnet = 0;
int debounce_knopf_runter = 0;
int debounce_knopf_rauf = 0;
# define TIMER_MS 10000 // 10 seconds debounce 300000 // 5 minutes
# define FAHRZEIT_MS 75000 // max 75 seconds for up/down of door
Arduino_Timer timer (TIMER_MS);
int debounced_read (int iopin, int *counter)
{
if (!digitalRead (iopin))
{
if ((*counter)++ >= 10)
{
*counter = 0;
return 0;
}
}
else
{
*counter = 0;
}
return 1;
}
void motor_an ()
{
digitalWrite (LED, HIGH);
digitalWrite (MOTOR, HIGH);
}
void motor_aus ()
{
digitalWrite (LED, LOW);
digitalWrite (MOTOR, LOW);
}
void linksrum ()
{
digitalWrite (MOTOR_DIR1, LOW);
digitalWrite (MOTOR_DIR2, HIGH);
}
void rechtsrum ()
{
digitalWrite (MOTOR_DIR1, HIGH);
digitalWrite (MOTOR_DIR2, LOW);
}
// Wir benutzen Status-Funktionen fuer jeden Status unserer Maschine:
// Wenn die Funktion 0 zurueckliefert, geht die Maschine in den naechsten
// Zustand, sonst bleibt sie im gleichen Zustand.
int fahren (int magnet)
{
if (!debounced_read (magnet, &debounce_magnet))
{
return 1;
}
if (timer.is_reached (millis ()))
{
motor_aus ();
timer.stop ();
errmsg = “Zeitueberschreitung fahren”;
status = STATUS_ERROR;
return 0;
}
return 0;
}
int starte_rauffahren ()
{
if (digitalRead (MAGNET_UNTEN))
{
errmsg = “Hochfahren: Tuere nicht unten”;
status = STATUS_ERROR;
return 0;
}
timer.start (millis (), FAHRZEIT_MS);
debounce_magnet = 0;
rechtsrum ();
motor_an ();
return 1;
}
int rauffahren ()
{
return fahren (MAGNET_OBEN);
}
int starte_runterfahren ()
{
if (digitalRead (MAGNET_OBEN))
{
errmsg = “Hochfahren: Tuere nicht oben”;
status = STATUS_ERROR;
return 0;
}
timer.start (millis (), FAHRZEIT_MS);
debounce_magnet = 0;
linksrum ();
motor_an ();
return 1;
}
int runterfahren ()
{
return fahren (MAGNET_UNTEN);
}
int nacht ()
{
int val;
motor_aus ();
val = analogRead (FOTO);
Serial.println (val);
if (val > HELL)
{
timer.start (millis ());
return 1;
}
return 0;
}
int tag ()
{
int val;
motor_aus ();
val = analogRead (FOTO);
Serial.println (val);
if (val < FINSTER)
{
timer.start (millis ());
return 1;
}
return 0;
}
int abend ()
{
int val;
motor_aus ();
val = analogRead (FOTO);
if (val > FINSTER)
{
status = STATUS_TAG;
return 0;
}
if (timer.is_reached (millis ()))
{
timer.stop ();
return 1;
}
return 0;
}
int morgen ()
{
int val;
motor_aus ();
val = analogRead (FOTO);
if (val < HELL)
{
status = STATUS_NACHT;
return 0;
}
if (timer.is_reached (millis ()))
{
timer.stop ();
return 1;
}
return 0;
}
int error ()
{
motor_aus ();
Serial.println (errmsg);
delay (100);
return 0;
}
# undef int
struct state {
int status;
int next_status;
int (*statefun)();
};
// Stati muessen in der Reihenfolge der numerischen Zustandswerte sein
// Zustaende muessen lueckenlos nummeriert sein
struct state stati [] =
{ { STATUS_TAG, STATUS_ABEND, tag }
, { STATUS_ABEND, STATUS_START_RUNTER, abend }
, { STATUS_NACHT, STATUS_MORGEN, nacht }
, { STATUS_MORGEN, STATUS_START_RAUF, morgen }
, { STATUS_START_RAUF, STATUS_RAUFFAHREN, starte_rauffahren }
, { STATUS_RAUFFAHREN, STATUS_TAG, rauffahren }
, { STATUS_START_RUNTER, STATUS_RUNTERFAHREN, starte_runterfahren }
, { STATUS_RUNTERFAHREN, STATUS_NACHT, runterfahren }
, { STATUS_ERROR, STATUS_ERROR, error }
};
void setup ()
{
pinMode (LED, OUTPUT);
pinMode (MAGNET_OBEN, INPUT);
pinMode (MAGNET_UNTEN, INPUT);
pinMode (MOTOR, OUTPUT);
pinMode (MOTOR_DIR1, OUTPUT);
pinMode (MOTOR_DIR2, OUTPUT);
pinMode (KNOPF_RUNTER, INPUT);
pinMode (KNOPF_RAUF, INPUT);
digitalWrite (MOTOR, LOW);
linksrum ();
digitalWrite (LED, HIGH);
digitalWrite (MAGNET_OBEN, HIGH); // enable pull-up resistor
digitalWrite (MAGNET_UNTEN, HIGH); // enable pull-up resistor
digitalWrite (KNOPF_RUNTER, HIGH); // enable pull-up resistor
digitalWrite (KNOPF_RAUF, HIGH); // enable pull-up resistor
Serial.begin (115200);
if (FINSTER >= HELL)
{
status = STATUS_ERROR;
errmsg = “FINSTER >= HELL”;
}
Serial.print (“initial state: “);
Serial.println (status);
}
void loop ()
{
struct state *st = &stati [status];
if (!debounced_read (KNOPF_RUNTER, &debounce_knopf_runter))
{
debounce_knopf_runter = 10;
linksrum ();
motor_an ();
neuinitialisieren = 1;
return;
}
else if (!debounced_read (KNOPF_RAUF, &debounce_knopf_rauf))
{
debounce_knopf_rauf = 10;
rechtsrum ();
motor_an ();
neuinitialisieren = 1;
return;
}
else if (neuinitialisieren)
{
motor_aus ();
errmsg = “Unbekannte Tuerposition bei Start”;
status = STATUS_ERROR;
if (!digitalRead (MAGNET_OBEN))
{
status = STATUS_TAG;
}
else if (!digitalRead (MAGNET_UNTEN))
{
status = STATUS_NACHT;
}
neuinitialisieren = 0;
debounce_knopf_rauf = debounce_knopf_runter = 0;
Serial.print (“Initialized to: “);
Serial.println (status);
return;
}
// Hard-coded error state must work if state-table is broken
if (status >= STATUS_ERROR)
{
error ();
return;
}
if (st->status != status)
{
status = STATUS_ERROR;
sprintf
( errbuf
, “Error in state-table, expected %d got %d”
, status
, st->status
);
errmsg = errbuf;
return;
}
if (st->statefun ())
{
status = st->next_status;
}
if (status != st->status)
{
sprintf (errbuf, “new state: %d->%d”, st->status, status);
Serial.println (errbuf);
}
}