Antennen Optimierung mit mehreren Kriterien
Seit einiger Zeit optimiere ich Antennen mit Genetischen Algorithmen. Ich verwende dafür das Paket für parallele Genetische Algorithmen, pgapack das ursprünglich von David Levine vom Argonne National Laboratory entwickelt wurde und das ich pflege (wie übersetze ich "maintain"?). Noch länger als die Pflege von pgapack entwickle ich eine Python Bibliothek für pgapack namens pgapy.
Für die Antennensimulation verwende ich Tim Molteno's PyNEC Paket, eine Bibliothek in Python für ein Paket zur elektromagnetischen Simulation namens "Numerical Electromagnetics Code (NEC) Version 2", geschrieben in C++ (auch bekannt als NEC++).
Mit diesen Paketen habe ich ein kleines Open Source Framework für die Antennen-Optimierung namens antenna-optimizer geschrieben. Dieses kann traditionelle Genetische Algorithmen mit Bit-Strings als Genen als auch Fließkomma-Repräsentationen mit dafür geeigneten Operatoren verwenden.
Das "Parallel" in pgapack sagt uns, dass die Evaluierungsfunktion des Genetischen Algorithmus parallelisiert werden kann. Bei der Optimierung von Antennen simulieren wir für jede Paramter-Kombination die einen Antenne darstellt diese mit PyNEC. Antennensimulation ist nach wie vor (der ursprüngliche NEC Code ist aus den 80er Jahren und wurde im Zeitalter von Lochkarten entwickelt) ein CPU-instensives Unterfangen. So ist es eine gute Nachricht, dass wir mit pgapack viele Simulationen parallel mit dem Message Passing Interface (MPI) Standard [1] durchführen können.
Für pgapack – und damit auch für pgapy – habe ich in letzter Zeit einige bewährte klassische Algorithmen implementiert:
Differential Evolution [2], [3], [4] ist ein erfolgreicher Optimierungs-Algorithmus für Fließkomma-Gene der für elektromagnetische Aufgaben sehr interessant ist.
Der "elitist Nondominated Sorting Genetic Algorithm" NSGA-II [5] erlaubt es in einem einzigen Optimierungslauf mehrere Zielfunktionen zu optimieren
Wir können Wertebeschränkungen im Zielbereich einer Funktion definieren die minimiert werden, sogenannte "Constraints" [6]. Damit eine Lösung gültig ist, müssen alle Constraints 0 oder negativ sein.
Traditionell ist mit Genetischen Algorithmen nur eine Evaluierungsfunktion, die sogenannte Zielfunktion möglich. Mit NSGA-II können mehrere Zielfunktionen oder Kriterien verwendet werden. Das Englische nennt solche Algorithmen "Multi-Objective Optimization" (Optimierung mehrerer Ziele).
Für die Antennensimulation heisst dass, wir müssen nicht mehrere Kriterien für eine gute Antenne wie Gewinn, Vorwärts/Rückwärtsverhältnis und Stehwellenverhältnis (SWV) in einer einzigen Evaluierungsfunktion zusammenfassen, was ich bisher im antenna-optimizer gemacht habe, sondern können sie separat definieren und dem Genetischen Algorithmus die Optimierung überlassen.
Mit mehreren Zielfunktionen ist es allerdings typischerweise so, dass die Verbesserung bei einem Ziel eine Verschlechterung bei einem anderen Ziel zur Folge hat und umgekehrt. Wir suchen also Lösungen die strikt besser sind als andere Lösungen. Eine Lösung dominiert eine andere Lösung wenn sie in einem Kriterium besser aber in keinem der anderen Kriterien schlechter ist als die andere Lösung. Alle Lösungen die dieser Definition entsprechen heissen Pareto-Optimal nach dem Italienischen Wissenschaftler Vilfredo Pareto der das Konzept von Pareto-Optimalität zuerst definiert hat. Alle Lösungen die dieses Optimalitäts-Kriterium erfüllen, liegen auf einer sogenannten Pareto-Front. Wenn wir nur zwei Zielfunktionen haben, können wir die Pareto-Front gut mit einem Scatterplot (Streudiagramm) darstellen, wie wir weiter unten sehen werden.
Weil pgapack einen Ansatz verfolgt, der die freie Kombination von Algorithmen unterstützt, können wir verschiedene erfolgreiche Strategien für unterschiedliche Teile des Genetischen Algorithmus kombinieren:
Für den Mutation/Crossover Teil können wir Differential Evolution (DE) verwenden
DE wiederum kann für mehrere Zielfunktionen mit der (Generations-) Ersetzungsstrategie von NSGA-II kombiniert werden
Wir können einige der Zielfunktionen als Beschränkungen (Constraints) definieren. Für unser Problem ist es sinnvoll nur Antennen zu erlauben die ein bestimmtes Stehwellenverhältnis (SWV) nicht überschreiten. Wir erlauben also keine Antenne mit einem SWV > 1.8. Die zugehörige Zielfunktion ist \(S - 1.8 \le 0\) wobei \(S\) das SWV ist.
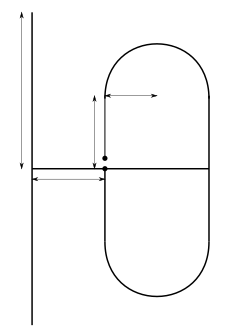
Mit dieser Kombination können wir erfolgreich Antennen für das 70cm Amaterufunkband (430 MHz - 440 MHz) berechnen. Die Antenne verwendet einen sogenannten Faltdipol (das Ding mit den Rundungen in der Grafik) und ein gerades Element. Die Messlinien in der Grafik repräsentieren die vom Genetischen Algorithmus optimierten Längen. Die zwei Punkte in der Mitte des Faltdipols zeigen den Punkt wo die Speiseleitung angeschlossen wird.
Ein erstes Beispiel simuliert Antennenparameter für die höchste, niedrigste und mittlere Frequenz. Der Gewinn und das Vorwärts/Rückwärtsverhältnis (Forward/Backward ratio in der Grafik) werden nur für die mittlere Frequenz berechnet:
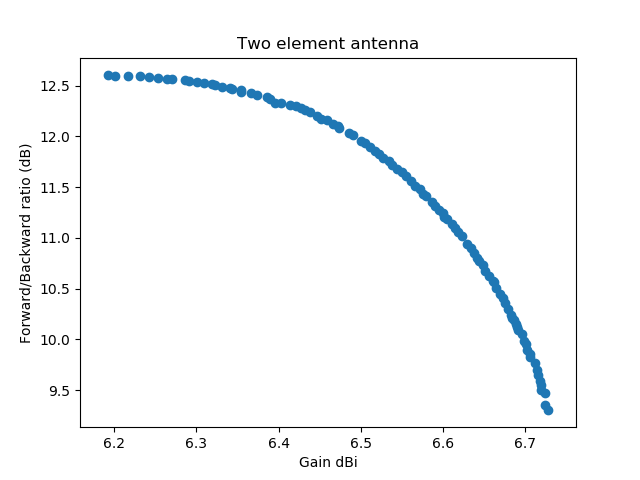
In dieser Grafik (ein Scatterplot) wird die erste Zielfunktion (der Gewinn) gegen die zweite Zielfunktion, das Vorwärts/Rückwärtsverhältnis aufgetragen. Alle Zahlen sind für die mittlere Frequenz. Jeder Punkt in der Grafik repräsentiert eine Antenne. Alle Antennen haben ein SWV kleiner als 1.8 auf der kleinsten, mittleren und höchsten Frequenz.
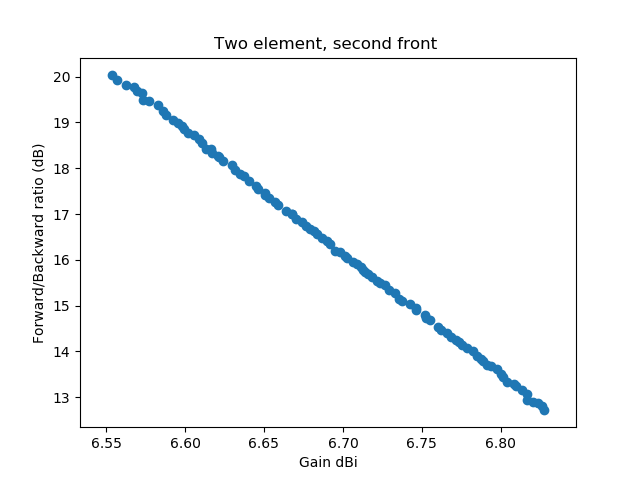
Nach diesem Erfolg habe ich dann angefangen, mit unterschiedlichen Einstellungen für die Parameter des Differential Evolution (DE) Algorithmus zu experimentieren. Es ist in der Literatur zu DE bekannt dass für "zerlegbare" (decomposable) Probleme eine niedrige Crossover-Rate besser ist, für nicht-zerlegbare eine höhere. Ein zerlegbares Problem zeichnet sich dadurch aus, dass die unterschiedlichen Dimensionen getrennt voneinander optimierbar sind, dies wurde zuerst von Salomon 1996 [7] beobachtet. Ursprünglich hatte ich eine Crossover-Rate von 0.2 eingestellt und meine Hoffnung war, dass die Optimierung mit einer höheren Rate besser und schneller funktionieren würde. Das Experiment unten verwendet eine Crossover-Rate von 0.9.
Zusätzlich habe ich mit "Dither" für den Skalierungsfaktor \(F\) von Differential Evolution (könnte vielleicht mit einem leichten "Zittern" Skalierung übersetzen) experimentiert. Mit diesem Faktor wird die Differenz von zwei Vektoren der Input-Parameter bei der Anwendung von DE multipliziert. In der ersten Implementierung hatte ich Dither auf 0 gesetzt, jetzt hatte ich 0.2 eingestellt. Ich war dann sehr überrascht dass ich mit diesen Einstellungen eine neue Pareto-Front als Lösung gefunden habe:
Damit man besser sieht, dass die zweite Front komplett die zuerst gefundene Front dominiert habe ich beide in einer Grafik geplottet:
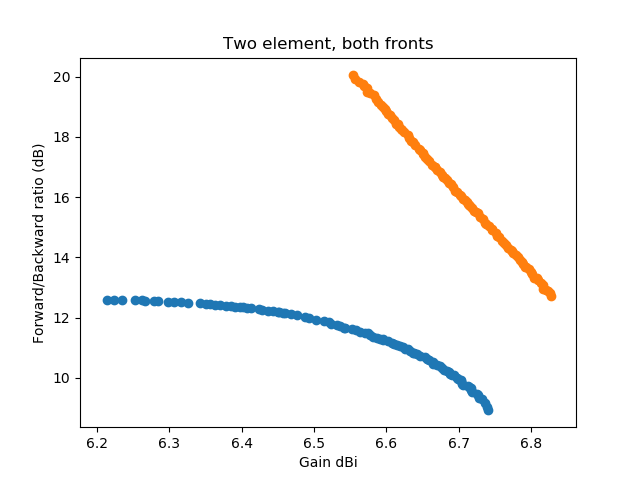
Weil diese zweite Front (über den gesamten Frequenzbereich) für eine Zwei-Elemente Antenne zu gut ausschaut um wahr zu sein schauen wir uns das im Folgenden genauer an. Zuerst schauen wir auf die Orientierung der Antenne und des berechneten Gewinn-Diagramms für eine der Antennen in der Mitte der unteren Front:
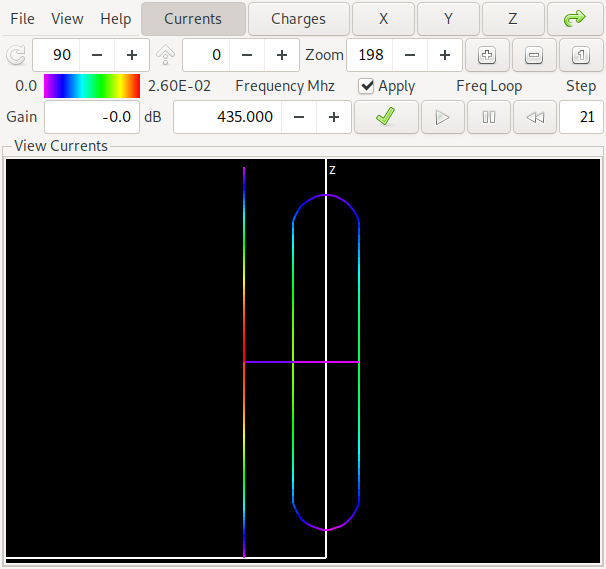
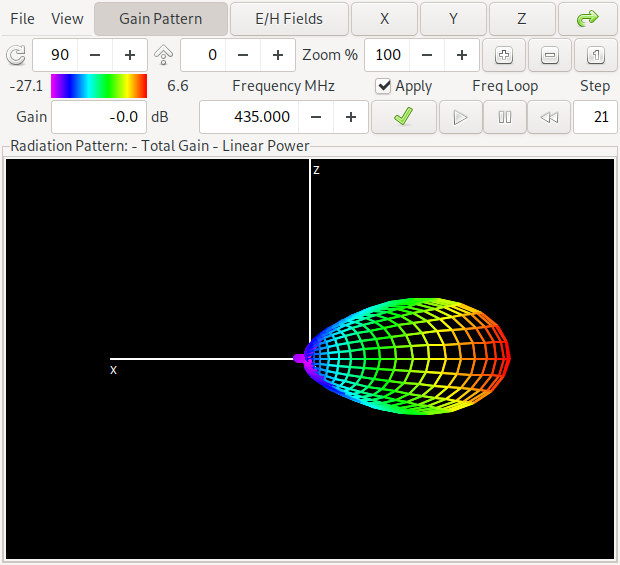
Die Antenne hat – wie schon aus der ersten Pareto-Front Grafik zu entnehmen – einen Gewinn von etwa 6.6 dBi und ein Vorwärts/Rückwärtsverhältnis von etwa 11 dB in der Mitte des Bandes bei 435 MHz. Die Einfärbung der Antenne deutet die Ströme in der Antennenstruktur an. Wer sich das selbst anschauen möchte: Hier ist ein Link zur NEC Input Datei für Antenne 1.
Vergleichen wir diese Antenne mit einer aus der Mitte der "orangen Front" wo wir deutlich bessere Ergebnisse bekommen:
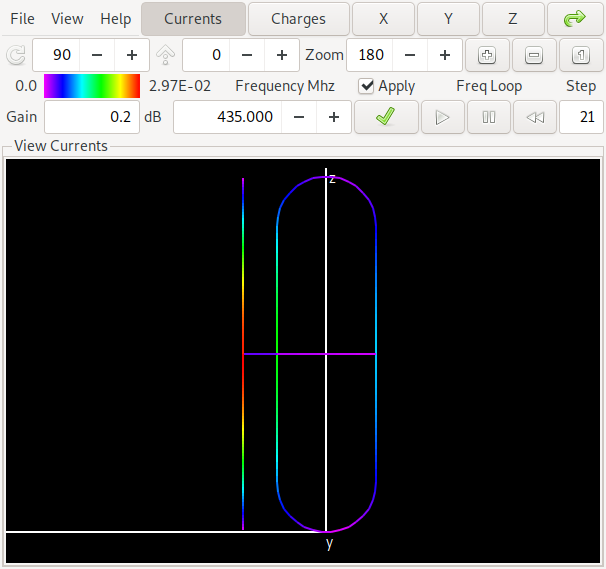
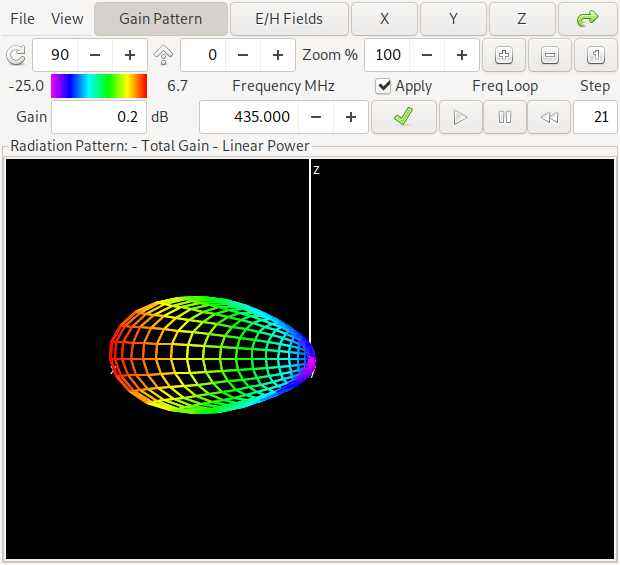
Diese Antenne ist aus der Mitte der oberen Pareto-Front und hat einen Gewinn von etwa 6.7 dBi sowie ein Vorwärts/Rückwärtsverhältnis von etwa 16 dB in der Mitte des Bandes bei 435 MHz. Wer entdeckt den Unterschied zur vorherigen Antenne? Ja: der maximale Gewinn liegt in der Gegenrichtung der ersten Antenne. Wir sagen dass bei der ersten Antenne das gerade Element ein Reflektor ist, während bei der zweiten Antenne das gerade Element als Direktor arbeitet. Auch hier ist ein Link zur NEC Input Datei für Antenne 2.
Nun schauen wir uns über die ganze Frequenz den Gewinn und das Vorwärts/Rückwärtsverhältnis an. Die linke Grafik ist für die erste Antenne (die mit dem Reflektor-Element), die rechte für die zweite Antenne wo das gerade Element als Direktor arbeitet.
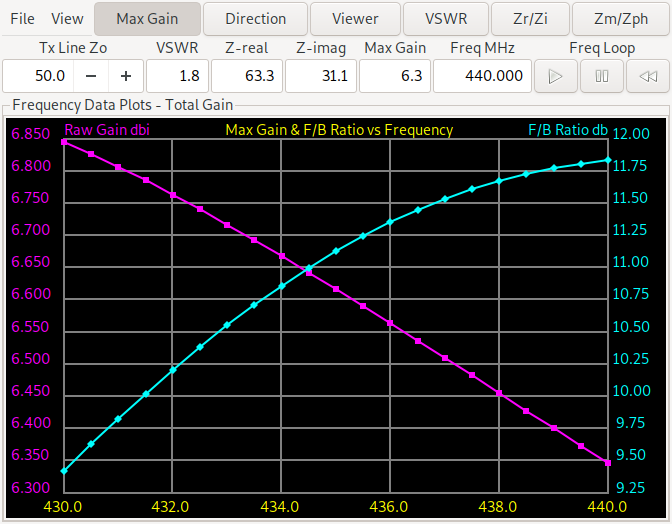
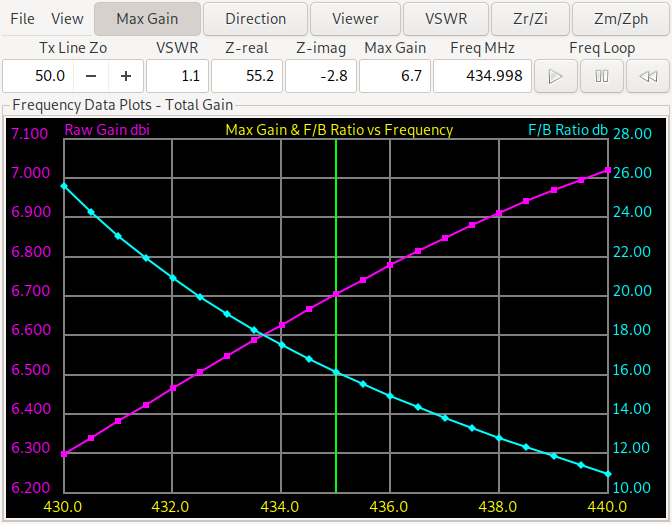
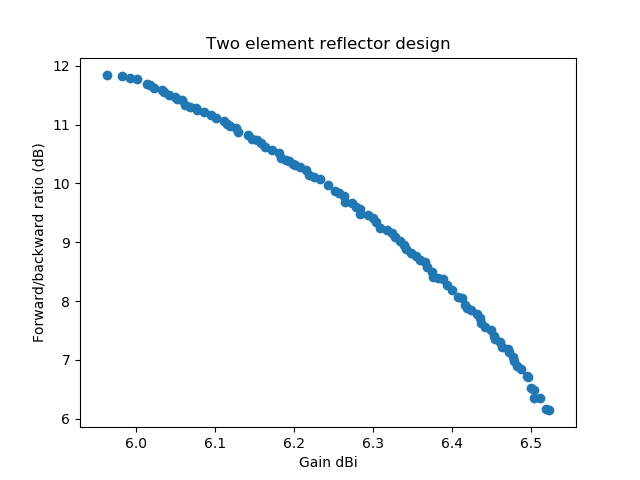
Wir sehen dass sich das Vorwärts/Rückwärtsverhältnis bei der Direktor Antenne von etwas mehr als 10 dB bis zu über 25 dB bewegt, während es für das Reflektor-Design von 9.3 dB bis 11.75 dB geht. Der Minimalgewinn ist beim Reflektor-Design etwas besser (6.35-6.85 dBi bzw. 6.3-7.05 dBi). Also brauchen wir weitere Experimente. Wenn man die Lösungen auf ein Reflektor-Design beschränkt und fordert dass der Minimalgewinn und das minimale Vorwärts/Rückwärtsverhältnis an den drei Stellen (untere, mittlere, obere Frequenz) genommen wird bekommen wir:
Für das gleiche bei einem Direktor Design (auch mit minimalem Gewinn und Vorwärts/Rückwärtsverhältnis bei allen drei Frequenzen (untere, mittlere, obere Frequenz) bekommen wir:
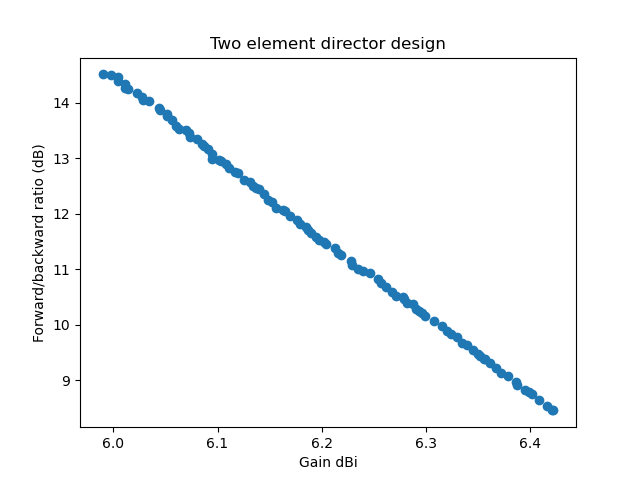
Mit diesen Resultaten ist der Sweet Spot für eine Antenne die man wirklich bauen will wahrscheinlich bei etwa 10 dB Vorwärts/Rückwärtsverhältnis oder darüber und bei einem Gewinn von etwa 6.2 dBi. Ein paar zehntel-dB mehr Gewinn rauszuholen und dabei mehrere dB Vorwärts/Rückwärtsverhältnis zu verlieren scheint nicht sehr sinnvoll. Beim Vergleich des Direktor mit dem Reflektor-Design fällt auf (was zumindest meiner Intuition widerspricht) dass das Direktor-Design ein besseres Vorwärts/Rückwärtsverhältnis über den gesamten Frequenzbereich hat. Wenn allerdings die Antenne für Relais-Kommunikation Verwendung finden soll wo die Sendefrequenz (die Relais-Eingabe) im unteren Teil des Frequenzbandes liegt und die Relais-Ausgabe (unsere Empfangsfrequenz) in der oberen Hälfte, würden wir vermutlich ein Reflektor-Design realisieren weil der Gewinn beim Senden besser ist und das Vorwärts/Rückwärtsverhältnis beim Empfang besser ist (vergleiche die beiden vorherigen Grafiken zu Gewinn und Vorwärts/Rückwärtsverhältnis).
Man beachte auch, dass der Optimierungs-Algorithmus Schwierigkeiten hat, überhaupt sinnvolle Lösungen für die Direktor-Variante zu finden. Nur bei einer handvoll Experimente war es überhaupt möglich, die obige Pareto-Front zu finden. Das Direktor-Design ist schmalbandiger als das Reflektor-Design und da das Stehwellenverhältnis ein Beschränkung (Constraint) ist, werden oft nur lokale Optima gefunden. Der größere Unterschied im Wertebereich von Gewinn- und Vorwärts/Rückwärtsverhältnis für das Direktor Design sagt uns ausserdem dass es schwieriger zu realisieren sein wird: Wenn die Dimensionen nicht exakt richtig getroffen werden wird die Antenne wohl weiter von den vorhergesagten Simulationsergebnissen abweichen. Das Reflektor-Design ist etwas toleranter in dieser Beziehung.
{kind=link}